DCR said somewhere that Garmin increases the GPS frequency/sampling rate when in open water swim mode – or something along those lines. That increased sampling needs to be done in order to compensate for the watch receiving no GPS signal when underwater and was needed in order to get a meaningful track of the workout.
A dangerous thing happened. That got me thinking.
So…
If you run in OWS mode then GPS accuracy could be improved. Hmmm. More frequent sampling surely means more accuracy? Sounded interesting.
I ran my 10-mile test route with 945+Galileo in OWS mode and I also used the Vantage M in best OWS mode, I used the Vantage M as I had not tested that with the last firmware update which was supposed to improve GPS. ie I was trying to do two tests for the price of one.
Unfortunately, the results were pants. Here are just a few selections of the pantsness of it all.
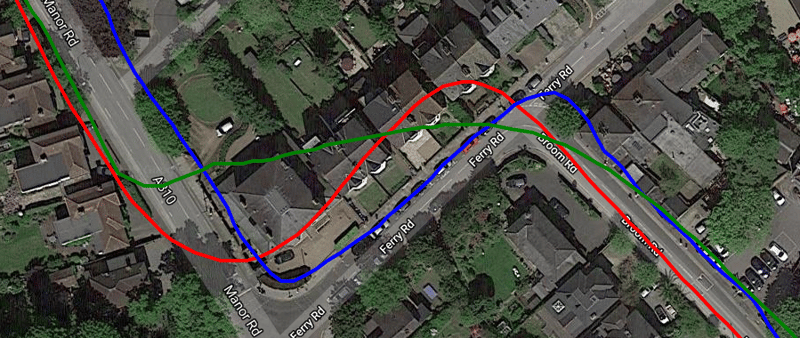
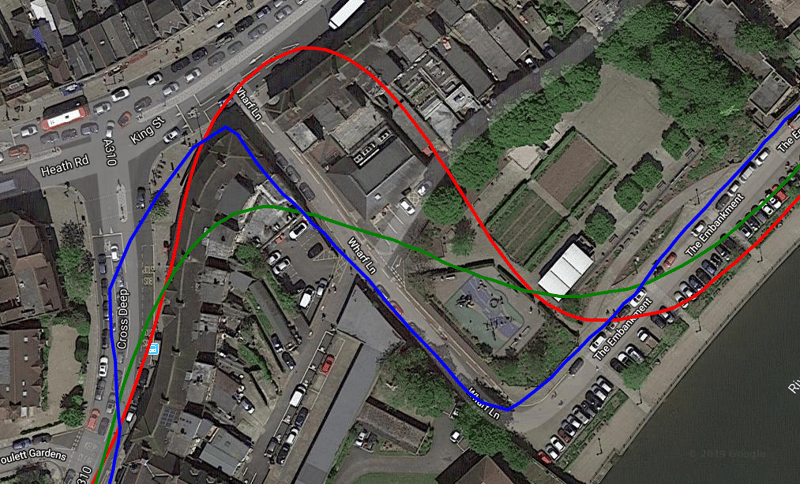
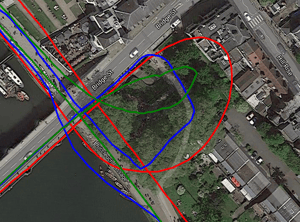
Key: Ambit in blue, 945 in green and Vantage M in red.
The only interesting thing to note is that the OWS tracks are very much more rounded than reality. We can perhaps infer backwards to how these devices work in OWS in water and conclude that the real swimming tracks we see must also be smoothed a lot.?
It’s a shame that this didn’t work. I think it’s a good idea to show bad or unexpected resutls as well as good ones…maybe that might set one of you off thinking down a different route?
I am also reminded of DCR’s recent post on the Absolute cycling device that supposedly increases a cyclists GPS accuracy by more frequent sampling. As much as I love increased accuracy I just can’t see the point of marginally better GPS accuracy for cycling…the pretty track at the end of your ride will look VERY similar to the one you already have and the speed number generated (that you don’t use because you look at power) will also not be as accurate as the one you get from your speed sensor.
I was reminded of my studies years ago where we looked at the metaphorical concept of ‘building a better mousetrap’ from a marketing perspective. The essence of what we were taught was that there was no point in improving something that already worked perfectly well for a hundred years even though innovation at the time was vital. That was a strange angle, as the original quote from Emerson suggested the opposite in that ‘continual innovation was good or even necessary’ and indeed Mr Emerson has been proved to be more correct than my tutor. For example, I’m sure there must be a Google Home-related mousetrap somewhere that notifies you when one of the pesky little so and so’s has just been caught. Innovation is good and there will, no doubt, be more robotic mousetrap-inventing millionaires in the future to sit alongside the mouse gene manipulating millionaires.
Maybe I just went to a rubbish university? (I didn’t, just perhaps I had a not-so-good marketing teacher!)
So yes! please keep innovating in all-things-GPS. Just please focus on doing it in running where it might actually make a difference.
See also: Garmin Running Dynamics | the5krunner
Last Updated on 11 April 2026 by the5krunner
Reader-Powered Content

This content is not sponsored. It’s mostly me behind the labour of love, which is this site, and I appreciate everyone who supports it.
Support the site: Follow (free, fewer ads) · Subscribe (paid, ad-free) · Buy Me A Coffee ❤️
All articles are written by real people, fact-checked, and verified for originality. See the Editorial Policy. FTC: Affiliate Disclosure — some links pay commission. As an Amazon Associate, I earn from qualifying purchases.

tfk is the founder and author of the5krunner, an independent endurance sports technology publication. With 20 years of hands-on testing of GPS watches and wearables, and competing in triathlons at an international age-group level, tfk provides in-depth expert analysis of fitness technology for serious athletes and endurance sport competitors.

I guess the OWS mode is all about filtering & smoothing. Try OWS in Running mode and you’ll see what unfiltered GPS data looks like. Zig-zags all over the place.
On the other hand, I’ve used V800 for swimrun in OWS mode with generally good results. Probably better GPS reception means they did not need to implement such a heavy smoothing algorithm.
yes i think the smaller distances involved in swimming between data points means that the smoothing is much less noticable on that scale. ie 2mph swimming vs 10mph running…big difference.
“…or something along those lines.”
Might be a wee bit of mix up on what I was talking about ;). I suspect you might be referring to my note that when I do openwater tests where I have a swim buoy (or swimcap) with a reference device, to *not* use openwater swim mode on that device, but rather running mode. That’s because OWS smooths heavily, even with perfect GPS reception (as you saw). The recording rate is dramatically reduced as well.
Interestingly though – I noticed on the most recent FR945 OWS beta that the recording rate on my OWS’s seemed super static/set in terms of data point intervals, rather than the more variable rates I’ve seen in the past. Historically the data point track rate seemed to be in the 10-30s range, but it seems much higher for me on the latest MARQ/FR945 OWS betas.
Ultimately – OWS mode from any vendor is all about algorithms more than GPS reception. It’s about taking a huge pile of horrible GPS data points and trying to come up with a pattern that represents where you swam. Obviously we’ve seen companies go backwards on this accuracy in the last 12-18 months (Garmin/Suunto/Polar), but we’ve also seen companies go forward too. My best OWS tracks as of 2018/2019 are still the Apple Watch. It can’t do land right, but it nails water. Go figure.
you and otillo have turned OWS into a navigation nightmare with all those swimbuoys. 😉 I keep getting lost in my local lake now as there are hundreds (well…a few) all over the place that I incorrectly sight to. 😉
yes, “…or something along those lines.” was added in to cover any of my errant memory lapses and that I couldn’t find the sentence I recalled (you’ve written a few!)
AW4: hmm, you might want to change this then “the Apple Watch seems to outperform the best GPS devices out there today. It doesn’t seem to matter on the sport, ” although we both found the aw4 corner smoothing IIRC
Haha…can never have enough swim buoys!
As for the AW4 sentence, I figured the next sentence in that post mostly takes care of it.
to save others googling that’s: “it’s more stable in a large number of scenarios. Yet on the other hand, this whole swooshing thing does legitimately take away from that. “
With all due respect: you should’ve run at SWIMMING pace! 😀